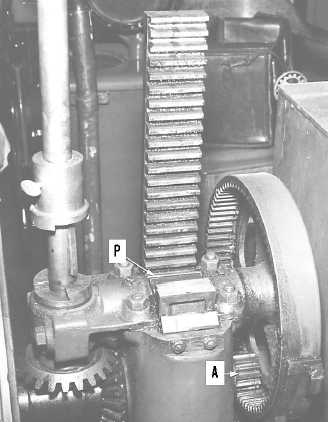
Figure 6-15.—A steering mechanism.The advantage from C to D is 3 to 1. The sprocketwheel to the far left, on the same shaft with D, iscalled a wildcat. The anchor chain is drawn up overthis. Every second link is caught and held by theprotruding teeth of the wildcat. The overallmechanical advantage of the winch is 4 x 3, or 12 to1.RACK AND PINIONFigure 6-15 shows you an application of the rackand pinion as a steering mechanism. Turning theship’s wheel turns the small pinion (A). This pinioncauses the internal spur gear to turn. Notice thatthis arrangement has a large mechanical advantage.Now you see that when the center pinion (P)turns, it meshes with the two vertical racks. Whenthe wheel turns full to the right, one rack movesdownward and the other moves upward to theposition of the racks. Attached to the bottom of theracks are two hydraulic pistons that control thesteering of the ship. You’ll get some information onthis hydraulic system in a later chapter.SUMMARYThese are the important points you should keep inmind about gears:Gears can do a job for you by changing the direction, speed, or size of the force you apply.When two external gears mesh, they always turn in opposite directions. You can make them turn in the same direction by placing an idler gear between the two.The product of the number of teeth on each of the driver gears divided by the product of the number of teeth on each of the driven gearsgives you the speed ratio of any gear train.The theoretical mechanical advantage of any gear train is the product of the number of teeth on the driven gear wheels, divided by the product of the number of teeth on the driver gears.The overall theoretical mechanical advantage of aWe compound machine is equal to the product of the theoretical mechanical advantages of all the simple machines that make it up.We can use cams to change rotary motion into linear motion.6-8
Integrated Publishing, Inc. - A (SDVOSB) Service Disabled Veteran Owned Small Business