
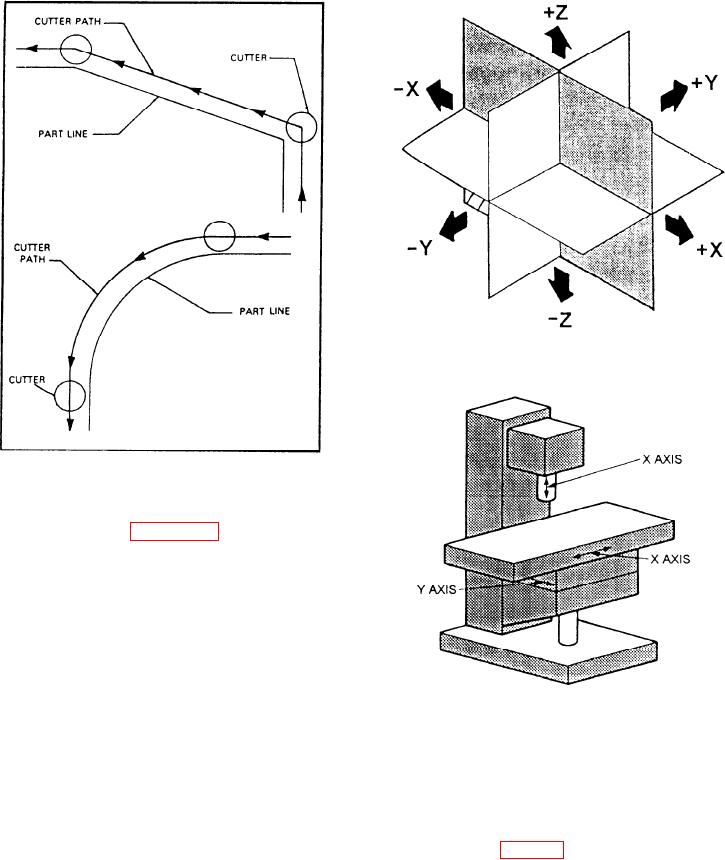
Figure 11-9.--Cartesian coordinate system.
Figure 11-8.--Continuous-path angles and arcs.
angles, as shown in figure 11-8. Most newer NC
machines are the continuous-path type.
SERVOMECHANISMS
It will be helpful to understand the drive systems
used on NC machinery. The drive motors on a particular
machine will be one of four types: stepper motors, dc
Figure 11-10.--Three-axis vertical mill.
servos, ac servos, or hydraulic servos. Stepper motors
move a set amount of rotation (a step) every time the
motor receives an electrical pulse. DC and ac servos are
widely used variable-speed motors found on small and
CARTESIAN COORDINATE SYSTEM
medium continuous-path machines. Unlike a stepper
motor, a servo does not move a set distance. When
The basis for all machine movement is the Cartesian
current is applied, the motor starts to turn: when the
coordinate system (fig. 11-9). Programs in either inch
current is removed, the motor stops turning. The ac
or metric units specify the destination of a particular
servo is a fairly recent development. It can develop
movement. With it, the axis of movement (X, Y, or Z)
more power than a dc servo and is commonly found in
and the direction of movement (+ or ) can be identified.
newer CNC machines. Hydraulic servos, like ac or dc
Some machining centers may have as many as five or
servos, are variable-speed motors. Because they are
six axes, but for our purposes we will only discuss three
hydraulic motors, they can produce much more power
axes. To determine whether the movement is positive
than an electric motor. They are used on large NC
(+) or negative (), the program is written as though the
machinery, usually with an electric or pneumatic
control system.
tool, rather than the work, is doing the moving.
11-8